基于激光雷达 SLAM 技术的 AVP 测试方案介绍
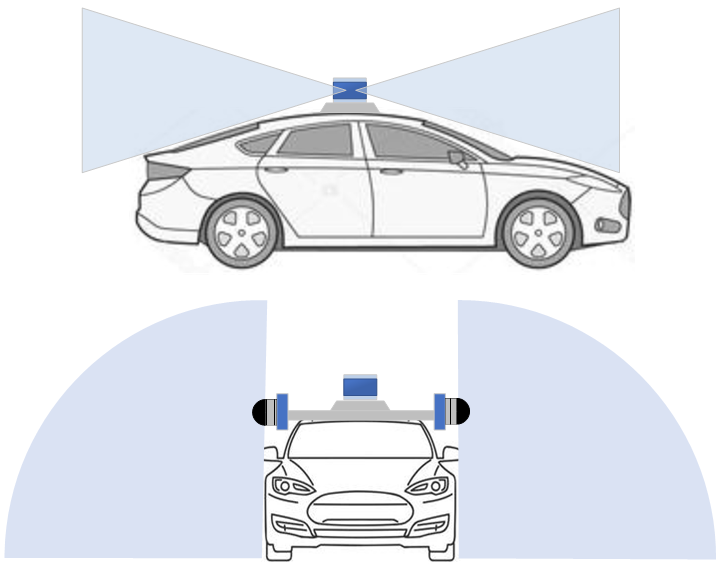
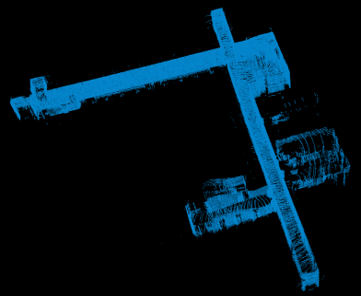
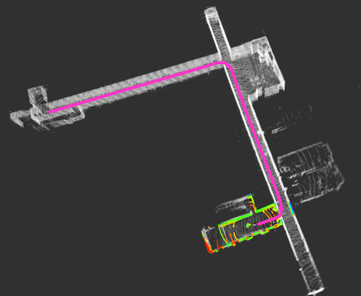
本方案使用一个环视 32 线激光雷达,两个 360°*90°(水平 180°)补盲雷达组成硬件方案,覆盖车辆周围 360°以及车辆两侧近距离范围内障碍物的探测和测量。基于激光SLAM 技术进行停车场地图绘制、自车位置坐标定位。通过补盲雷达可以探测到车辆两侧近距离障碍物并进行距离(主要应对空间车位泊车姿态测量)对于划线车位,通过选择参考点并测量车位信息后在绘制的地图中进行标注即可。搭载本测试系统的车辆可以完成对目标停车场地图的绘制、车辆定位、空间车位及划线车位泊车姿态测量等。
测试流程图

雷达布置方案
硬件架构

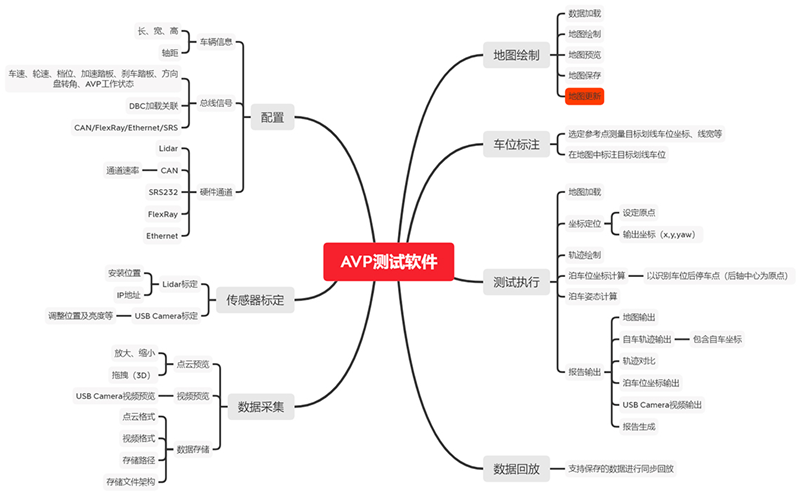
软件架构
地图绘制
轨迹绘制及姿态测量
硬件架构
软件架构
地图绘制
轨迹绘制及姿态测量